编者按:
电动汽车的应用给车辆路线问题带来了更多的挑战,如何为给定路线行驶的电动汽车设计充电决策是一个需要解决的难题,本文介绍了开源python包frvcpy使用精确式算法对该问题求解。
文献解读:Aurelien Froger, Jorge E Mendoza, Ola Jabali, and Gilbert Laporte. Improved formulations and algorithmic components for the electric vehicle routing problem with nonlinear charging functions. Computers & Operations Research, 104:256–294, 2019.
摘要:电动汽车为更可持续的交通提供了一条途径,但电动汽车的采用带来了石油同行所没有的新挑战。解决这些挑战的车辆路线问题中的一项艰巨任务是确定如何为在给定路线上行驶的电动汽车做出良好的充电决策。这就是所谓的固定路线车辆充电问题。对于这项任务,存在一种精确有效的算法,但其实现非常复杂,足以阻止研究人员采用它。在这项工作中,我们介绍了frvcpy,一个实现该算法的开源Python包。我们的一揽子计划旨在让研究人员更容易解决电动汽车的路线问题,促进优化工具的开发,最终实现电动汽车的大规模采用。
1 背景及文献分析
1.1 背景概述
电动汽车是实现更可持续交通的一种手段;然而,它们带来了传统内燃机车辆对手无法应对的技术挑战。例如,由于电动汽车单次充电可行驶的距离通常小于等效CV在油箱上行驶的距离,因此电动汽车可能需要更频繁的充电操作。相对于CV拥有的发达的加油站网络,电动汽车充电基础设施的稀疏性加剧了这种不确定性,这可能迫使电动汽车绕更长的路给电池充电。此外,尽管最近电池和充电站(CS)技术有所改进,但为电动汽车充电仍需要比为CV加油多几个数量级的时间。充电所需的时间与电动汽车的充电状态(SoC)(电池中剩余的相对能量)相比也是非线性的,需要额外的优化工具。
在车辆路径问题的研究中,这种用于传统车辆的优化工具的开发引起了运筹学界的极大关注。解决电动汽车带来的挑战的附加约束的加入,标志着VRP中出现了一系列新的问题,称为电动汽车路线问题(E-VRP)。解决E-VRP的主要任务之一是做出良好的充电决策,即在哪里充电以及充电多长时间。这是固定路线车辆充电问题(FRVCP)的关键,在该问题中,充电操作必须插入电动汽车访问的固定客户序列中,以最大限度地缩短电动汽车以能源可行的方式到达序列末尾的时间。FRVCP自然会作为许多E-VRP中的一个子问题出现,因为它的解决方案是确定给定路线的真实持续时间或成本所必需的。因此,拥有一种有效的FRVCP解决方法对推进E-VRP研究至关重要。
虽然存在FRVCP解决方案方法,但它们往往会受到以下一个或多个问题的影响:不精确性(例如,提供次优解决方案的启发式方法)、效率(例如,其解决方案需要大量运行时间的混合整数规划)或缺乏稳健性(例如,仅限于简化版本的FRVCP的精确算法)。这项工作实现了一种解决方案方法,该方法不解决任何这些问题。它基于Froger等人提出的标签算法,尽管有能力,但实现起来却是出了名的困难。为了减轻未来E-VRP研究人员的实现负担,我们在开源Python包frvcpy(FRVCP和Python的组合;Kullman等,2020a)中进行了实现。frvcpy被设计为易于嵌入到更复杂的E-VRP解决方案中(如在(元)启发式或Benders分解中):它需要最小的依赖性和输入,可以通过命令行或Python API访问,并包括一个解释器,用于从VRP社区中的常见实例格式生成所需的输入VRP-REP(Mendoza等,2014)。
使用frvcpy的目的是使解决E-VRP变得更容易,从而刺激该领域的额外研究,有望在物流领域带来更可持续的实践。
1.2 文献分析
FRVCP属于电动汽车路线问题的范畴,这本身就是VRP研究的一部分,在这里只关注FRVC。关于EVRP的综述,参考Pelletier等(2016);以及VRP的综述可以参考Braekers等(2016)。
Montoya等(2016)在研究绿色车辆路线问题时,遇到了FRVCP。他们考虑的FRVCP假设车辆在两站之间只能访问一个CS,在充电时总是完全恢复能量(即遵循“完全充电策略”),并且这样做需要恒定的时间。为了解决这个FRVCP,他们有一个精确的算法。Roberti和Wen(2016)在他们关于带时间窗口的E-VRP的工作中讨论了一个FRVCP,并提出了一种精确求解该FRVCP的算法。他们的解决方案采用了部分充电策略,假设充电所需的时间与能量成线性关系。但是,与Montoya等(2016)不同的是,他假设CS网络是同质的;即所有CS具有相同的充电技术。
FRVCP也出现在Hiermann等(2016),Schier和Walther(2017),以及Hiermann等(2019)的工作中。这些研究提供了FRVCP的精确算法,假设在两站之间最多可以访问一个CS,CS是同质的,并且充电需要线性时间。Hiermann等(2016)采用完全充电策略,而Schier和Walther(2017)以及Hiermann 等(2019)则使用允许部分充电。
Montoya等(2017)考虑了非线性的充电问题。在这项研究中,他们还证明了线性充电时间的假设可能导致不可行或次优的解决方案。这个版本的FRVCP允许部分充电和异构CS,但假设在中继点之间最多可以插入一个CS。为了解决他们的FRVCP,作者们使用了启发式和MIP公式。Koåc等人(2019)采用Montoya等人的启发式和MIP公式,解决了他们在具有共享CS和非线性充电的E-VRP工作中出现的类似FRVCP。Baum等(2019)随后提出了一种标签算法来解决真实道路网络上的FRVCP,该算法也适应了现实的充电时间,并允许多次CS插入,尽管它仅限于路线长度为2(起点-终点的OD对)的特殊情况。
最后,Froger等(2019)提出了一种精确的标签算法来解决Montoya等(2017)的FRVCP。他们的算法不限于OD对,而且它还允许EV在路线的站点之间访问多个CS,使其成为上述FRVCP变体中最丰富的。在近30000个实例的试验上,他们将其标签算法与MIP公式的启发式和商业求解器进行了比较。他们发现,标签算法与MIP的最优性,与启发式算法的运行时间相匹配。因此,该算法是解决FRVCP的现有技术。然而,作者指出,它的性能并非没有成本。他们表示,考虑到实现标签算法的复杂性,E-VRP研究人员最终可能更喜欢采用启发式解决方案,尽管其性能较差。我们在frvcpy中实现了该算法,试图确保其复杂性不会妨碍其被应用。
Froger等(2019)的算法也经过了改编,以适应具有附加约束的FRVCP。例如,在研究具有公共CS的随机E-VRP的工作中,Kullman等(2019)设计改编算法,以适应具有离散充电决策和CS的时间相关等待时间的FRVCP。同样,Kullman等(2020b)对早期版本的frvcpy进行了调整,以适应具有客户时间窗口的FRVCP。在这两种情况下,在基于Benders的分支和切割过程中,算法被反复调用以解决子问题,因此需要算法的速度和准确性。
2 问题描述和算法概述
2.1 FRVCP的问题定义
我们考虑一个固定的EV路径 Π = ( π 1 , . . . , π R ) \Pi=(\pi_{1}, ...,\pi_{R}) Π=(π1,...,πR),这条路径从车场 π 1 \pi_{1} π1出发,经过 R − 2 R-2 R−2个中继点,最终停靠于车场 π R \pi_{R} πR。EV在车场 π 1 \pi_{1} π1时的电量水平为 q 0 q_{0} q0,通常等于EV电池的最大容量 Q Q Q。令 I = { π 1 , . . . , π R } I=\{\pi_{1}, ...,\pi_{R}\} I={π1,...,πR}表示该路径对应的节点集合,同时考虑一组充电站集合C,EV可以在这些充电站进行充电。每个充电站有多种充电方式(快充和慢充),每一类充电方式的充电过程通常可以表示为一个分段线性函数 Φ c ( t ) \Phi_{c}(t) Φc(t),表示一个空电池在充电站c充电t时间的电量。其反函数 Φ c − 1 ( q ) \Phi_{c}^{-1}(q) Φc−1(q)表示从0电量充到电量q需要花费的时间,由此我们可以根据反函数曲线,计算在充电站c处EV电池从电量 q 1 q_{1} q1充电至电量 q 2 q_{2} q2的耗时为 u c ( q 1 , q 2 ) = Φ c − 1 ( q 2 ) − Φ c − 1 ( q 1 ) u_{c}(q_{1},q_{2})=\Phi_{c}^{-1}(q_{2})-\Phi_{c}^{-1}(q_{1}) uc(q1,q2)=Φc−1(q2)−Φc−1(q1)。令集合 B c B_{c} Bc表示在充电站c处的充电函数的分段点集合,对于每个分段点对应一个 ( b i t , b i q ) (b_{i}^{t},b_{i}^{q}) (bit,biq)的二元组;当EV行驶在弧段 ( i , j ) (i,j) (i,j)上时,其行驶时间 t i j t_{ij} tij和电量消耗 e i j e_{ij} eij是已知的,并且假设它们都符合三角不等式。对于路径 Π \Pi Π中的中继点,EV可能需要一些其他的处理时间(如等待时间),FRVCP的目标是确定充电决策,包括:在哪个CS充多少电、最小化EV遍历完该路径的总时间,这些决策受制于非负的能源水平。
2.2 Froger的标签算法概述
考虑到算法的复杂性,我们在这里提供了一个粗略的概述,并请读者参阅Froger等(2019)以了解更多细节(特别是参见他们在§5.3和附录E中对算法3的讨论)。为了找到给定路线的最优充电决策,将FRVCP重新表述为资源约束的最短路径问题。然后,该算法通过在修改后的图上的节点上设置标签来工作,以反映EV可能沿其移动的情况。
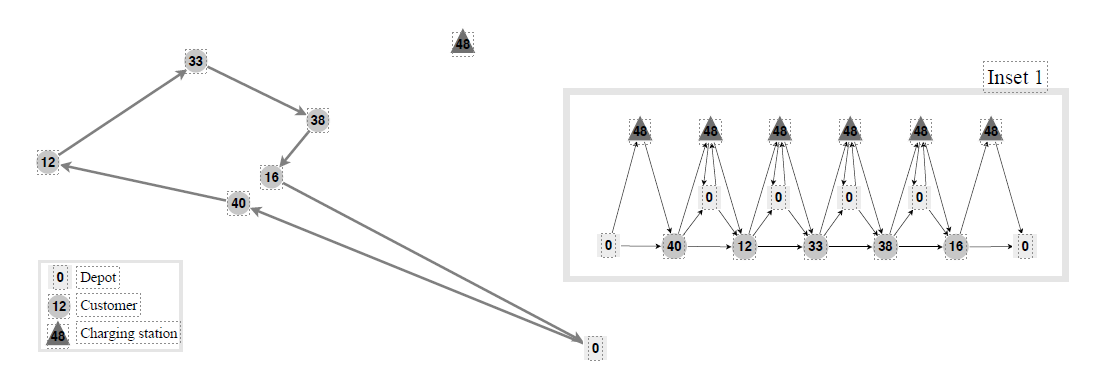
例如在下图中,一条EV路径为(0,40,12,33,38,16,0),对应的修改图为将CS作为虚拟节点插入到路径中,记为(0,[48],40,[48],12,[48],33,[48],38,[48],16,[48],0)。
标签通过一个包含多个支撑点的分段线性SoC函数表示。在算法执行期间,标签沿着图中的节点进行扩展。当标签扩展到CS节点c时,我们为
B
c
B_{c}
Bc中的每个断点创建新的支撑点,我们可以对其充电(即,具有比我们到达时更高能量的断点)。
例如下图中,标签沿边从客户33延伸到CS 48的过程;当它到达CS 48时,其SoC函数对应一个支撑点
z
1
z_{1}
z1,即右图中的黑色方块所示。然后,根据CS的充电函数的每个断点(b2,b3,b4),在对应SoC函数中添加三个支撑点(z2,z3,z4)。

我们继续沿着图中的节点扩展标签,直到到达目的节点 π R \pi^{R} πR,此时算法返回标签的SoC函数中第一个支持点的时间。在预处理中建立了能量和时间的界限,并在算法执行过程中与占优规则一起使用,以提高其效率。
3 frvcp包概述
frvcpy是Froger等(2019)的标签算法的开源Python实现,用于解决FRVCP。在本节中,我们概述了其结构,演示了其用途,并简要评论了其性能。
3.1 结构
frvcpy是一个用Python 3编程语言构建的小程序包(大约1000行代码);它在Python包索引中可用,可以通过“pip-install-frvcpy”安装。
pip install frvcpy
它由三个主要模块组成:core.py、solver.py和algorithm.py。
- core.py模块由算法执行中所需的辅助对象的类定义组成,如节点、标签和FRVCP问题实例。
- Module solver.py定义了面向用户的solver类,该类负责预处理、调用算法和将解决方案写入文件。
- 算法本身及其附带的函数包含在algorithm.py中。
- 此外,该包还包含模块translator.py,它提供了一个实例翻译器,允许frvcpy和VRP-REP实例之间的互操作性。VRP-REP是一个社区驱动的车辆路线问题数据文件存储库;更多详细信息,请参见Mendoza等(2014)。
3.2 输入和输出
用户可以使用Python API或通过命令行界面(CLI)与frvcpy进行交互。
frvcpy的输入参数包括:一个兼容的实例、EV行驶的固定路线和EV的初始能量。兼容的实例是遵循Kullman等(2020a)中可用模式的JSON文件(或等效Python字典)。
执行后,算法返回最优能量可行路径及其持续时间。返回的路由是一个元组列表,表示站点的节点ID和要在那里充电的能量(后者由关键字“None”表示非CS节点)。
3.3 安装测试
测试安装。frvcpy提供了简单的测试来确定其安装是否成功。从命令行,用户可以执行命令frvcpy test来运行一套测试,该测试执行实例转换并解决Froger等(2019)的134个FRVCP。同样的测试套件也可以通过:
import frvcpy.test
frvcpy.test.runAll()
执行完上述代码,运行结果如下:
test_evrpnl_instances (test.TestFrvcpAlgo)
Run solver on each of the E-VRP-NL routes for the instance. ... ok
test_manuscript_instance (test.TestFrvcpAlgo)
Test the algorithm on the route from the manuscript. ... ok
test_translation (test.TestFrvcpAlgo)
Translate an instance, compare it to a known reference ... ok
WARNING: Using default Python precision. Precision type 'decimals' ignored.
INFO: Depot assumed to be a CS with the instance's fastest charging type (fastest found was '{fastest}').
INFO: Only nodes' service_time is preserved from requests. All other info ignored.
----------------------------------------------------------------------
Ran 3 tests in 0.456s
OK
3.4 测试代码
3.4.1 代码用例
下面提供了一个示例,演示通过Python API调用frvcpy。考虑一个vrprep兼容实例“vrprep-instance.xml”,如下图所示。电动汽车从满电开始,分配固定路线(0,40,12,33,38,16,0),如图中的灰色箭头所示。

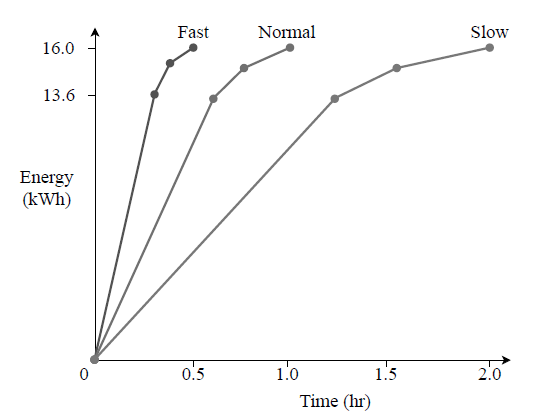
该实例的CS包含“快速”、“正常”和“慢速”三种充电方式,对应的充电函数如下图所示。
由于电动汽车在不充电的情况下,没有足够的能量完成该路线,我们求解了一个FRVCP来确定CS的最佳插入位置。可以调用frvcpy来实现,对应的代码为:
from frvcpy import solver
route = [0,40,12,33,38,16,0] # route to make energy feasible
q_init = 16000 # vehicle's initial energy level
#从文件中获取一个已有的算例
frvcp_solver = solver.Solver("instances/frvcpy-instance.json", route, q_init)
# 运行作者设计的算法
duration, feas_route = frvcp_solver.solve()
# 将解决方案写到输出文件种
frvcp_solver.write_solution("my-solution.xml", instance_name="frvcpy-instance")
# 输出路径的最优耗时
print(f"Duration: {duration:.4}")
# 输出路径的能量情况
print(f"Energy-feasible route:\n{feas_route}")
运行上述代码得到的解为:
Duration: 7.339
Energy-feasible route:
[(0, None), (40, None), (12, None), (33, None), (48, 6673.379615520617), (38, None), (16, None), (0, None)]
该结果的含义为:路径总耗时为7.339小时,在中继点33和中继点38之间插入CS 48,并在CS 48处充电6673.379615520617。同时,从图中也可以看出,将CS 41插入的行驶时间更短,但是由于CS 41是慢充,而 CS 48是快充,所以选择了更远的CS 48。
3.4.2用例转换
用例转换主要是从VRP-REP格式的实例转换为本python包适用的实例。
from frvcpy import translator
# 方式1:将xml格式的实例,转换为json格式的用例
translator.translate("instances/vrprep-instance.xml", to_filename="instances/my-new-instance.json")
# 方式2:直接读物xml格式的实例,提供给求解器
frvcp_instance = translator.translate("instances/vrprep-instance.xml")
3.4.3 算例含义解读
上述转换是假设VRP-REP instances 算例是根据 Montoya et al. (2017) 的算例格式组织的。
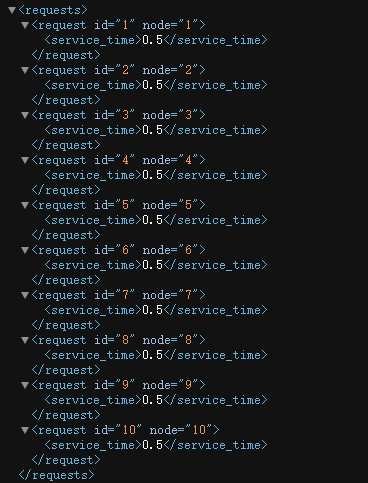
算例中有四部分构成,如下图。

- info:表示算例的基本信息,记录算例名称(tcAcBsCcDE)
- A表示生成客户类型,0表示随机分布,1表示聚类,2表示混合类型
- B表示顾客点的数目
- C表示CS的数目
- D有CS的分布类型,有两层含义:如果为f表示随机分布,如果为t表示p-median启发式
- E表示每个参数组合的实例数
- network表示节点网络:使用标签记录网络中的节点列表
- 车场的 ID=0,对应的属性为0
- 接下来是 N 个顾客,其IDs为 {1, …, N},对应的属性为1
- 最后是CSs,其IDs 为{N+1, …, N+C},对应的属性为2;CS有定制的子节点用来表示其充电类型,并使用<cs_type>表示其充电方式,包括慢充、正常和快速。
- 计算使用14位精度的欧式距离

- fleet表示电动车标签:
- EV的起点和目的地均设置为0
- 最大行驶时间为10
- 速度因子为40km/h
- 在电动车的定义中使用标签为EV配置充电函数;电车能量消耗率 wh/km;电池容量wh;充电函数类型,给出函数的每个分段点。

- requests表示需求标签,给出每个中继节点的服务时间
3.5 性能验证
作者们在Froger等(2019)的测试环境下,测试了frvcpy在近30000个实例中的性能。这些实例的中间路线长度为10个中继点,中间可插入18个CS。在测试中,该算法的平均运行时间为5.6ms。此外,在相同的测试中,我们发现我们的解释器可以在平均0.1s的时间内从VRP-REP格式进行实例住阿奴按。这些结果表明,frvcpy需要非常低的运行时间,以便包含在更大的E-VRP解决方案中。
4 总结
博客介绍了frvcpy,这是Froger等(2019)针对固定路线车辆充电问题的标签算法的一种基于Python的开源实现。该算法和本文的实现是灵活的,能够适应现实问题的特点,如非线性充电时间、部分充电决策和异构充电站技术。
由于FRVCP通常被编码为更一般的电动汽车路径问题的子问题,我们将frvcpy设计为易于嵌入更大的解决方案中。
为此,该包包含两种交互模式,要求最低,计算效率高。我们希望frvcpy能够促进电子VRP的解决方案,降低该领域的进入壁垒,并最终帮助更快地过渡到更可持续的交通实践。
5 参考文献
- Moritz Baum, Julian Dibbelt, Andreas Gemsa, Dorothea Wagner, and Tobias Z¨undorf. Shortest feasible paths with charging stops for battery electric vehicles. Transportation Science, 53(6):1627–1655, 2019.
- Kris Braekers, Katrien Ramaekers, and Inneke Van Nieuwenhuyse. The vehicle routing problem: State of the art classification and review. Computers & Industrial Engineering, 99:300–313, 2016.
- Aur´elien Froger, Jorge E Mendoza, Ola Jabali, and Gilbert Laporte. Improved formulations and algorithmic components for the electric vehicle routing problem with nonlinear charging functions. Computers & Operations Research, 104:256–294, 2019.
- Gerhard Hiermann, Jakob Puchinger, Stefan Ropke, and Richard F Hartl. The electric fleet size and mix vehicle routing problem with time windows and recharging stations. European Journal of Operational Research, 252(3):995–1018, 2016.
- Gerhard Hiermann, Richard F Hartl, Jakob Puchinger, and Thibaut Vidal. Routing a mix of conventional, plug-in hybrid, and electric vehicles. European Journal of Operational Research, 272(1):235–248, 2019.
- Ca˘grı Ko¸c, Ola Jabali, Jorge E Mendoza, and Gilbert Laporte. The electric vehicle routing problem with shared charging stations. International Transactions in Operational Research, 26(4):1211–1243, 2019.
- Nicholas D Kullman, Justin C Goodson, and Jorge E Mendoza. Electric vehicle routing with public charging stations. 2019.
- Nicholas D Kullman, Martin Cousineau, Justin Goodson, and Jorge E. Mendoza. Dynamic Ridehailing with Electric Vehicles. working paper or preprint, January 2020a.
- Nicholas D Kullman, Aurelien Froger, Jorge E Mendoza, and Justin C Goodson. e-vro/frvcpy v0.1.0, February 2020b.
- Jorge E Mendoza, C Gu´eret, M Hoskins, H Lobit, V Pillac, T Vidal, and D Vigo. VRP-REP: the vehicle routing community repository. In Third Meeting of the EURO Working Group on Vehicle Routing and Logistics Optimization (VeRoLog). Oslo, Norway, 2014.
- Alejandro Montoya, Christelle Gu´eret, Jorge E Mendoza, and Juan G Villegas. A multi-space sampling heuristic for the green vehicle routing problem. Transportation Research Part C: Emerging Technologies, 70:113–128, 2016.
- Alejandro Montoya, Christelle Gu´eret, Jorge E Mendoza, and Juan G Villegas. The electric vehicle routing problem with nonlinear charging function. Transportation Research Part B: Methodological, 103:87–110, 2017.
- Office of Transportation and Air Quality. U.S. Transportation Sector Greenhouse Gas Emissions 1990-2017, June,2019.
- Samuel Pelletier, Ola Jabali, and Gilbert Laporte. 50th anniversary invited article—goods distribution with electric vehicles: review and research perspectives. Transportation Science, 50(1):3–22, 2016.
- Roberto Roberti and Min Wen. The electric traveling salesman problem with time windows. Transportation Research Part E: Logistics and Transportation Review, 89:32–52, 2016.
- Maximilian Schier and Grit Walther. An adaptive large neighborhood search for the location-routing problem with intra-route facilities. Transportation Science, 52(2):331–352, 2017.
- Martin Uhrig, Lennart Weiß, Michael Suriyah, and Thomas Leibfried. E-mobility in car parks–guidelines for charging infrastructure expansion planning and operation based on stochastic simulations. In EVS28 International Electric Vehicle Symposium and Exhibition, pages 1–12, 2015.